
Description
Device emits a high-frequency sound wave that alerts the robot to things in its path. A Programming Kit is needed to change the program in the VEX Controller.
- Measure distances from 1.5in to 115in
- Detect obstacles using high frequency sound waves
- Create more autonomous function
Overview
An ultrasonic range finder sensor enables a robot to detect obstacles in
its path by utilizing the propagation of high-frequency sound waves.
The sensor emits a 40kHz sound wave, which bounces off a reflective
surface and returns to the sensor. Then, using the amount of time it
takes for the wave to return to the sensor, the distance to the object
can be computed. To increase the sensing range, the sensor can be
mounted to a servo to allow it to rotate.Unlike the bumper
switch and limit switch that alert you when they have been hit, the
ultrasonic range finder sensor can alert you to an obstacle in the path
of the robot prior to hitting it. This can allow you time to safely
navigate around obstacles.
Sensitivity
The sensitivity of the sensor depends on the objects’ surfaces that are detected by the emitted sound waves. For example, a reflective surface may produce a different reading than a non-reflective surface. The resolution of the sensor also depends on the sound waves. However, sound waves can reflect or be absorbed and possibly not return with enough power.
- Sensitivity: Detect a 3cm diameter pole at greater than 2m.
- Usable Range: 3.0 centimeters – 3.0 meter / 1.5 inches – 115 inches
- Frequency: 40 KHz
- Resolution: 1 inch
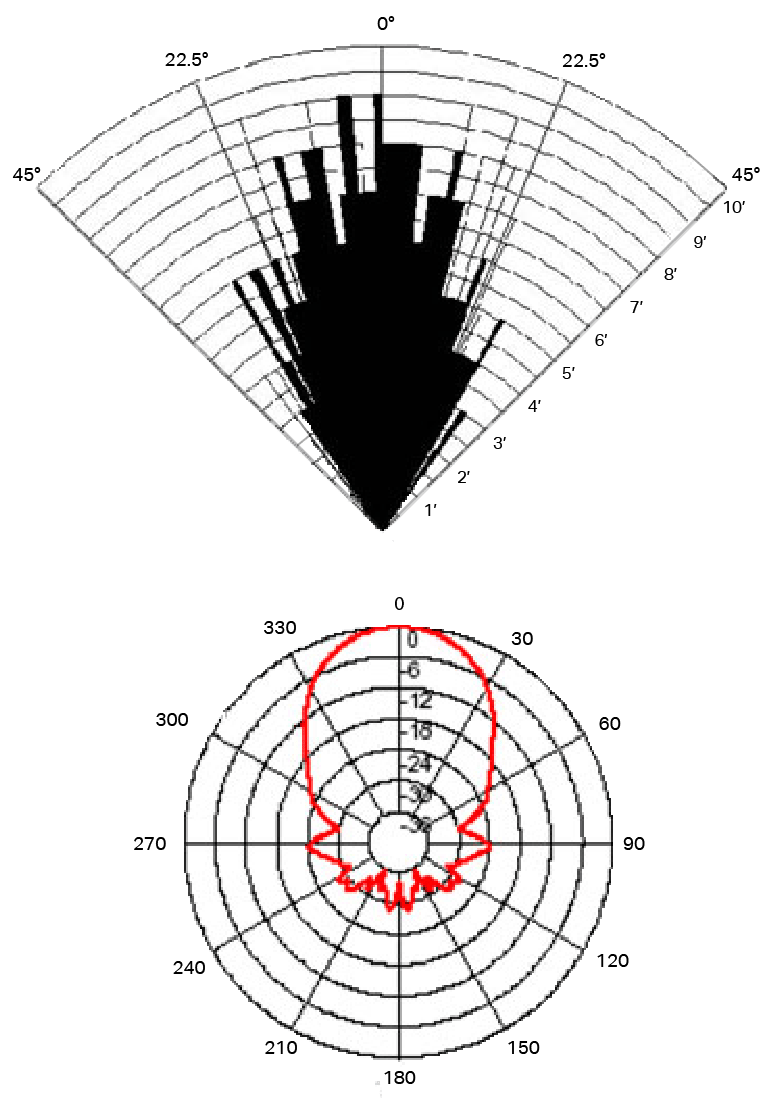
Bean Pattern
| Product Specs | Ultrasonic Range Finder Specifications |
|---|---|
| Inputs |
|
| Outputs | 3-Wire Cable Connects to a interrupt port. Echo response from the ultrasonic sensor.
|
- (1) Ultrasonic Range Finder
- Compatible with all VEX Microcontrollers and 3-Wire Extension Cables


There are no reviews yet.