
Description
This will allow you to calculate the speed of the shaft, as well as the distance it has traveled using programming software. Encoders are typically used for “infinite rotation” applications, such as a drive wheel. A Programming Kit is needed to change the program in the VEX Controller to use the Quadrature Encoder.
- Measure Angular Travel
- Determine Rotational Direction
- Calculate Shaft Speed
- Calculate Distance Traveled
- Increase Navigational Control
- More Autonomous Functionality
Overview
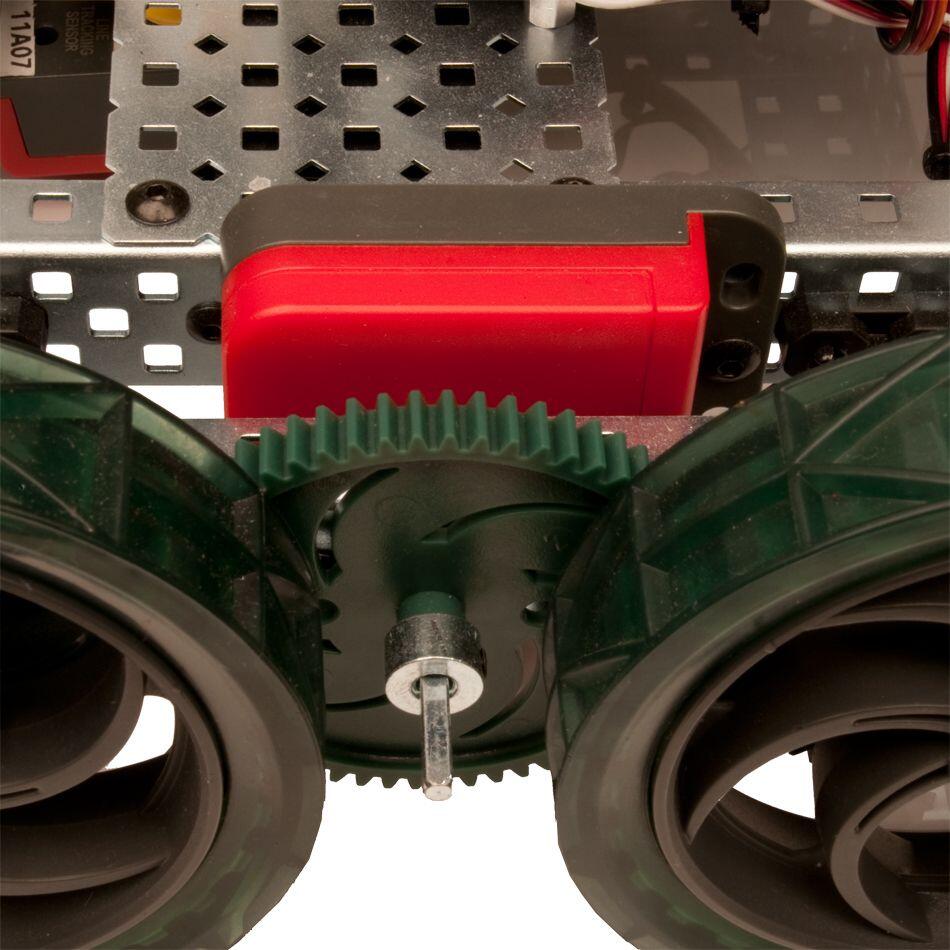
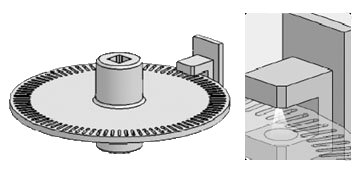
The Optical Shaft encoder is used to measure both relative position of and rotational distance traveled by a shaft. It works by shining light onto the edge of a disk outfitted with evenly spaced slits around the circumference. As the disk spins, light passes through the slits and is blocked by the opaque spaces between the slits. The encoder then detects how many slits have had light shine through, and in which direction the disk is spinning.
The Optical Shaft Encoder can be used to improve a robot in various ways. The encoder can measure rotational distance traveled and speed, which can be used to monitor, for example, the angular position of a robot gripper arm or the speed of a robot. Knowing these parameters can greatly assist you with performing autonomous tasks with your robot.
Applications
The Optical Shaft Encoder can be used to track distance traveled, direction of motion, or position of any rotary component, such as a gripper arm. The encoder can also be used to detect movement, which could facilitate richer interaction between the robot and its environment (e.g., human-robot interaction). If a human moves a robot arm that is attached to an encoder (e.g., during a handshake), the robot detects the arm movement and the direction(s) and distance(s) traveled, helping the robot classify the interaction as a handshake.
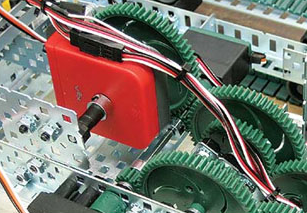
Figure 2. Optical Shaft encoder mounting system
Range Limits
While the diameter of the disk in the encoder does not really matter, the diameter of the wheel or gear whose shaft passes through the encoder does! The circumference of the wheel is equal to its diameter multiplied by pi (approx. 3.14). Multiplying the distance traveled which when multiplied by the number of revolutions gives of the distance traveled.
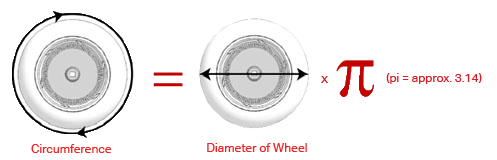
Figure 3. Wheel circumference formula
The optical shaft encoder can detect up to 1,700 pulses per second, which corresponds to 18.9 revolutions per second and 1,133 rpm (revolutions per minute). Faster revolutions will therefore not be interpreted exactly, potentially resulting in erroneous positional data being passed to the microcontroller.
| Product Specs | Optical Shaft Encoder Specifications |
|---|---|
| Weight |
|
| Inputs |
|
| Outputs |
3-Wire Cable Connects to two interrupt port.
|
Other Info
- Sensor – Infrared light sensor and infrared LED, Encoder Wheel has 90 slits
- Cortex Resolution – 1 degree
- PIC Resolution – 2 degrees with ROBOTC, 4 degrees with easyC and easyC PRO
- (2) Optical Shaft Quadrature Encoder
- Compatible with all VEX Microcontrollers and 3-Wire Extension Cables



There are no reviews yet.